


Un robot, entrenado por primera vez viendo vídeos de cirujanos experimentados, ejecutó los mismos procedimientos quirúrgicos con tanta habilidad como los médicos humanos.


El uso exitoso del aprendizaje por imitación para entrenar robots quirúrgicos elimina la necesidad de programar a los robots con cada movimiento individual requerido durante un procedimiento médico y acerca el campo de la cirugía robótica a la verdadera autonomía, donde los robots podrían realizar cirugías complejas sin ayuda humana.
Los hallazgos , “Surgical Robot Transformer (SRT): Imitation Learning for Surgical Tasks”, dirigidos por investigadores de la Universidad Johns Hopkins, se destacan esta semana en la Conferencia sobre Aprendizaje Robótico en Múnich, un evento de primer nivel sobre robótica y aprendizaje automático.
“Es realmente mágico tener este modelo. Todo lo que hacemos es introducirle información de la cámara y puede predecir los movimientos robóticos necesarios para la cirugía”, dijo el autor principal Axel Krieger , profesor adjunto del Departamento de Ingeniería Mecánica de la JHU . “Creemos que esto marca un importante paso adelante hacia una nueva frontera en la robótica médica”.
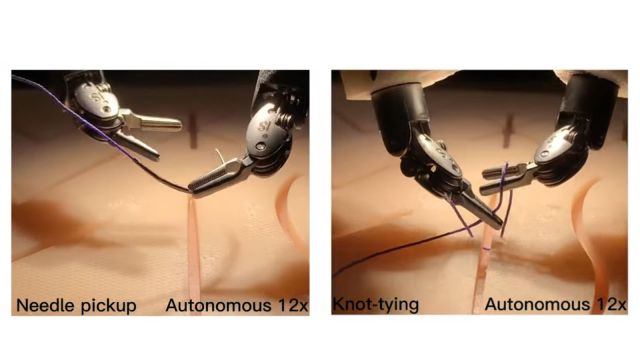
El equipo, que incluía a investigadores de la Universidad de Stanford, utilizó el aprendizaje por imitación para entrenar al robot del sistema quirúrgico da Vinci a realizar tres tareas fundamentales necesarias en los procedimientos quirúrgicos: manipular una aguja, levantar tejido corporal y suturar. En cada caso, el robot entrenado en el modelo del equipo realizó los mismos procedimientos quirúrgicos con la misma destreza que los médicos humanos.
El modelo combina el aprendizaje por imitación con la misma arquitectura de aprendizaje automático que sustenta ChatGPT. Sin embargo, mientras que ChatGPT trabaja con palabras y texto, este modelo habla “robot” con cinemática, un lenguaje que descompone los ángulos del movimiento robótico en matemáticas.
Los investigadores alimentaron su modelo con cientos de vídeos grabados con cámaras de muñeca colocadas en los brazos de robots Da Vinci durante procedimientos quirúrgicos.
Estos vídeos, grabados por cirujanos de todo el mundo, se utilizan para análisis posoperatorios y luego se archivan. Se utilizan casi 7.000 robots Da Vinci en todo el mundo y más de 50.000 cirujanos reciben formación sobre el sistema, lo que crea un gran archivo de datos que los robots pueden «imitar».
Si bien el sistema Da Vinci se utiliza ampliamente, los investigadores afirman que es notoriamente impreciso. Pero el equipo encontró una manera de hacer que la entrada defectuosa funcionara. La clave fue entrenar al modelo para que realizara movimientos relativos en lugar de acciones absolutas, que son inexactas.
“Todo lo que necesitamos es una imagen para que este sistema de IA encuentre la acción correcta”, dijo el autor principal Ji Woong “Brian” Kim, investigador postdoctoral en Johns Hopkins. “Descubrimos que incluso con unos pocos cientos de demostraciones, el modelo es capaz de aprender el procedimiento y generalizar nuevos entornos con los que no se ha encontrado”.
Krieger agregó: “El modelo es muy bueno a la hora de aprender cosas que no le hemos enseñado. Por ejemplo, si deja caer la aguja, la recogerá automáticamente y continuará. Esto no es algo que yo le haya enseñado a hacer”.

Según los investigadores, el modelo podría utilizarse para entrenar rápidamente a un robot para que realice cualquier tipo de procedimiento quirúrgico. El equipo ahora está utilizando el aprendizaje por imitación para entrenar a un robot para que realice no solo pequeñas tareas quirúrgicas, sino una cirugía completa.
Antes de este avance, programar un robot para que realizara incluso un aspecto simple de una cirugía requería codificar manualmente cada paso. Alguien podría pasar una década tratando de modelar la sutura, dijo Krieger. Y eso es suturar solo para un tipo de cirugía.
“Es muy limitado”, dijo Krieger. “Lo nuevo aquí es que solo tenemos que recopilar el aprendizaje por imitación de diferentes procedimientos y podemos entrenar a un robot para que lo aprenda en un par de días. Esto nos permite acelerar el objetivo de autonomía mientras reducimos los errores médicos y logramos cirugías más precisas”.
Entre los autores de Johns Hopkins se encuentran el estudiante de doctorado Samuel Schmidgall, el ingeniero de investigación asociado Anton Deguet y el profesor asociado de ingeniería mecánica Marin Kobilarov. Los autores de la Universidad de Stanford son el estudiante de doctorado Tony Z. Zhao y la profesora adjunta Chelsea Finn.
Cactus24 (25-11-2024)
Te invitamos a seguirnos en nuestra cuenta de Instagram @cactus24informa para mantenerte informado del acontecer noticioso en Falcón, Venezuela y el mundo.
Abre este enlace para unirte al WhatsApp, Telegram y Facebook


